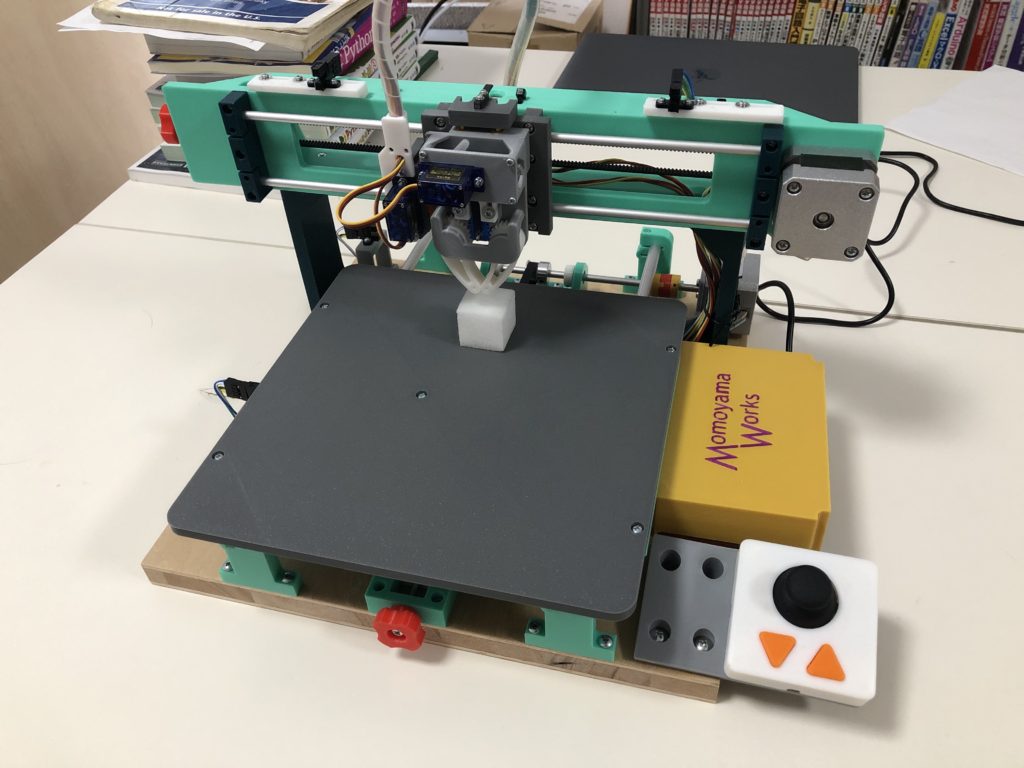
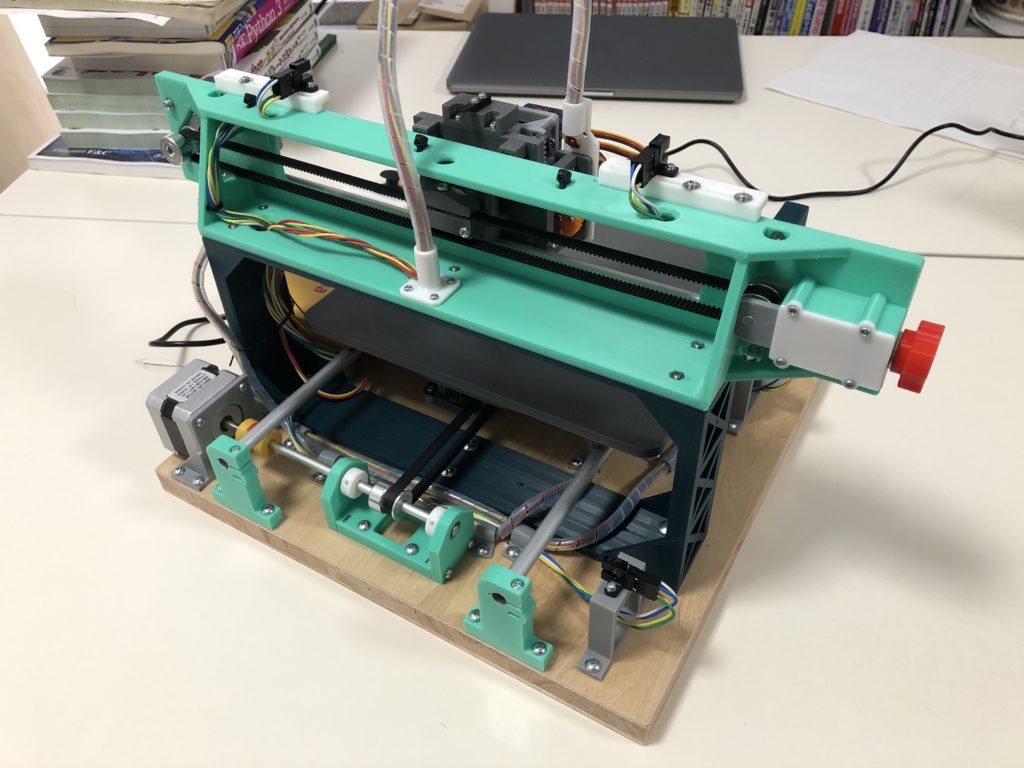
This project is an extension of the factory robot model from an earlier post. The conveyor has been replaced with a table that moves from front to back. Together with the side-to-side motion of the gripper, this forms an X-Y cartesian plane, hence the project name X-Y pick and place. Click on any photo to see a short video of the machine in action.