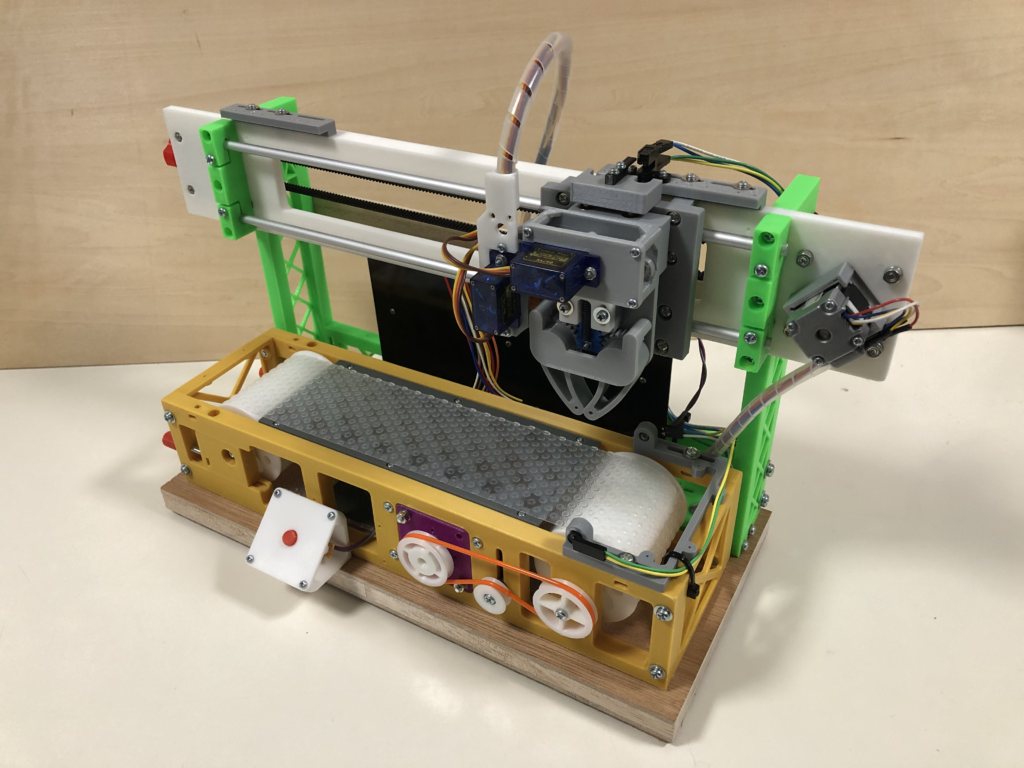
The factory robot model is a pick and place with conveyor belt. It includes many basic elements that are used in factory machines: Stepper motors, servo mothers, ball bearings, linear bushings, timing and rope pulleys and tensioning systems, gears, and sensors. It’s controlled by an Arduino Nano.
When the operator presses the start button, a gripper picks up a package from one end of a conveyor belt and carries it to the other end. Then the conveyor returns the package to the original position.
Most of the mechanical parts are 3D printed to reduce the number of purchased parts and therefore cost. Basically, everything other than motors, bearings and fasteners, everything is 3D printed.
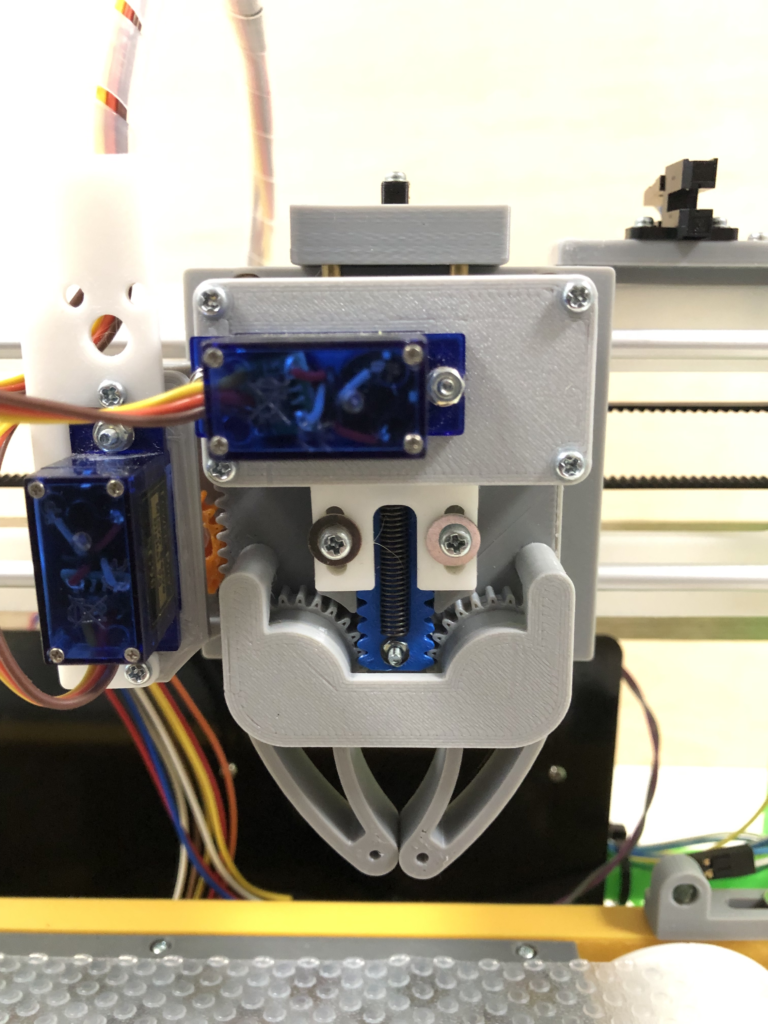
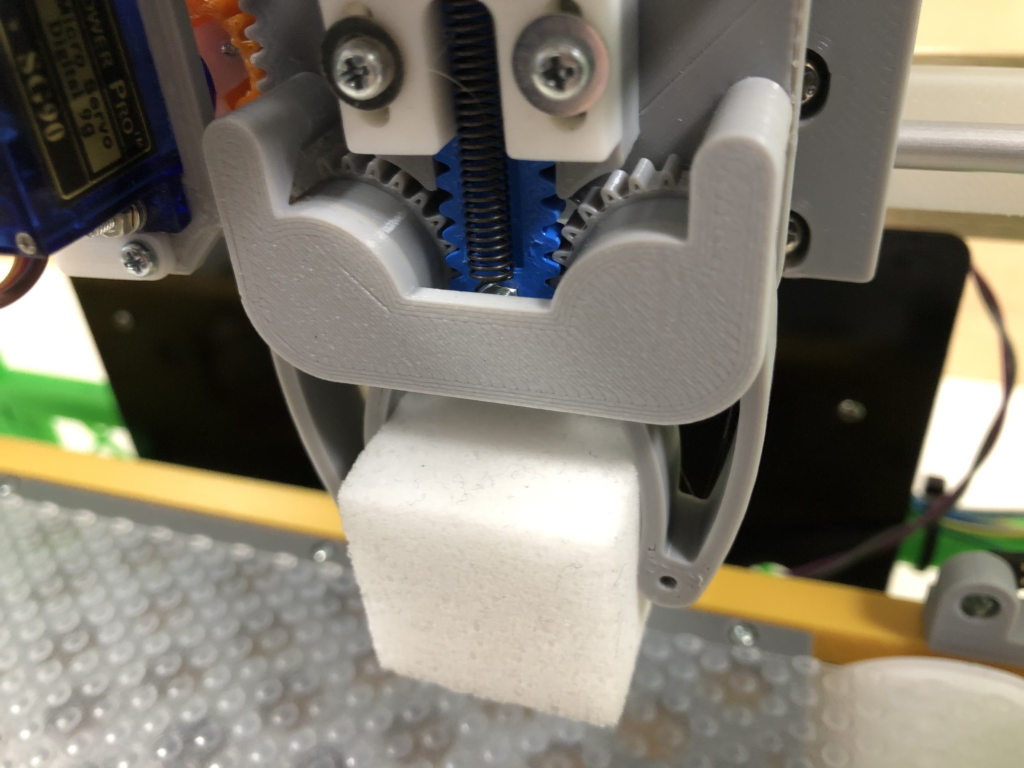
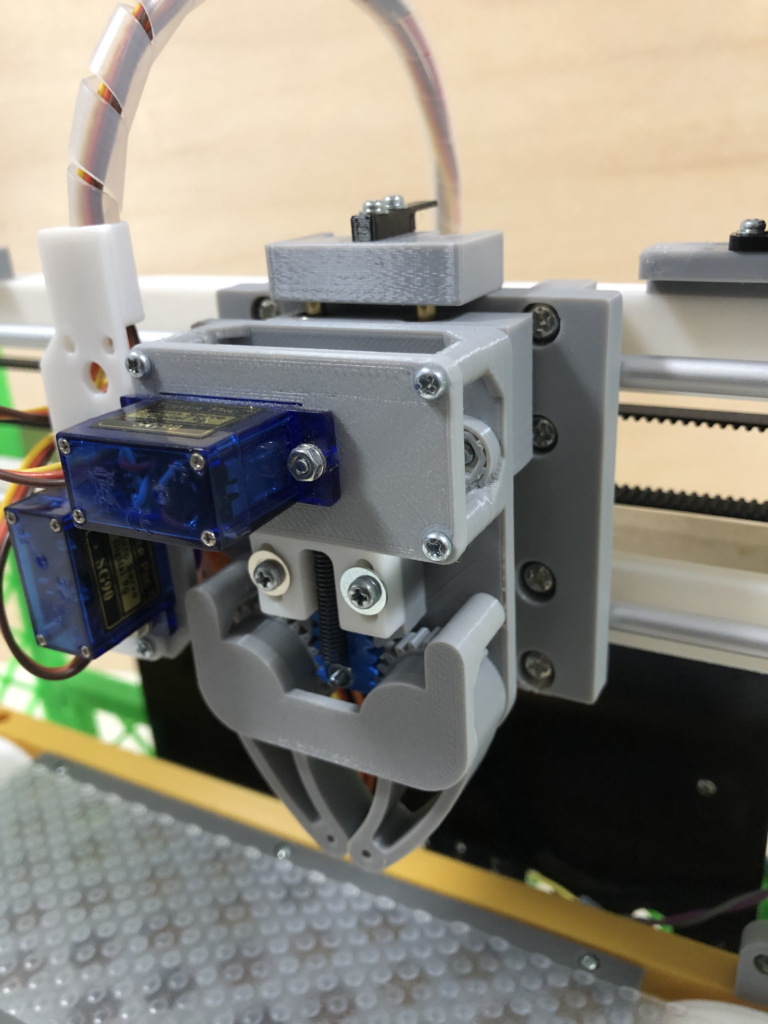
Gripper
The gripper jaws are actuated by rack and pinion. The pinion gears are incorporated into the jaws. The jaws open when a servo motor arm pushes down on the rack, and close when the servo arm force is removed and a spring pulls the rack up. The gripper assembly travels up and down on rails and is actuated by another servo motor.
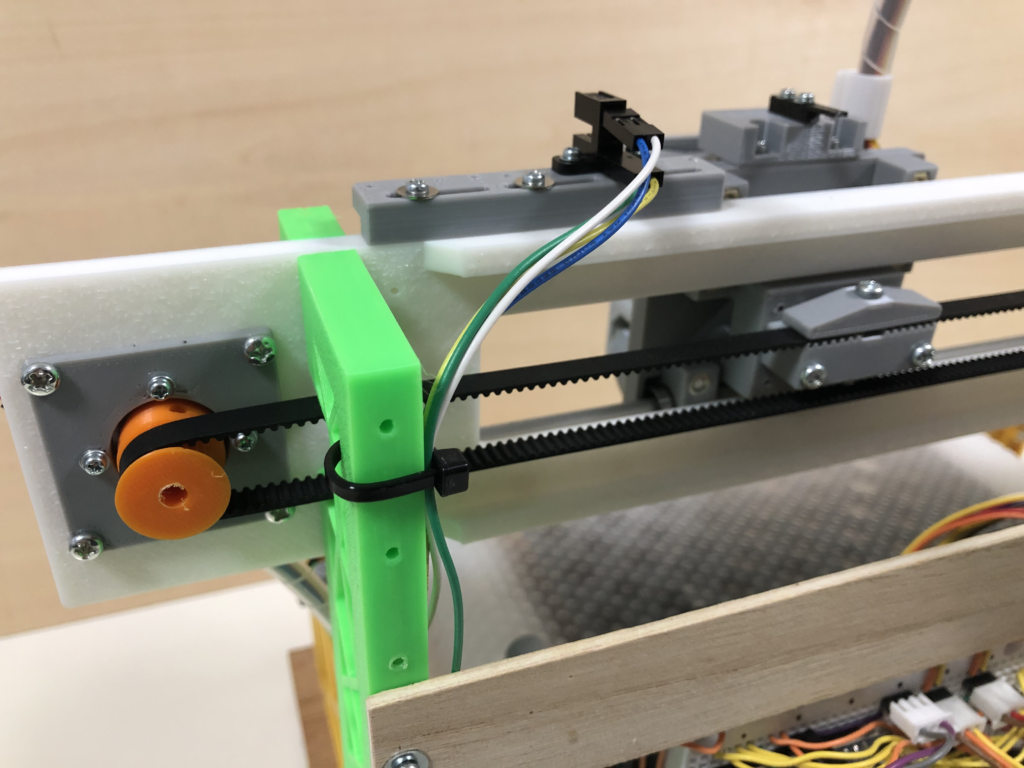
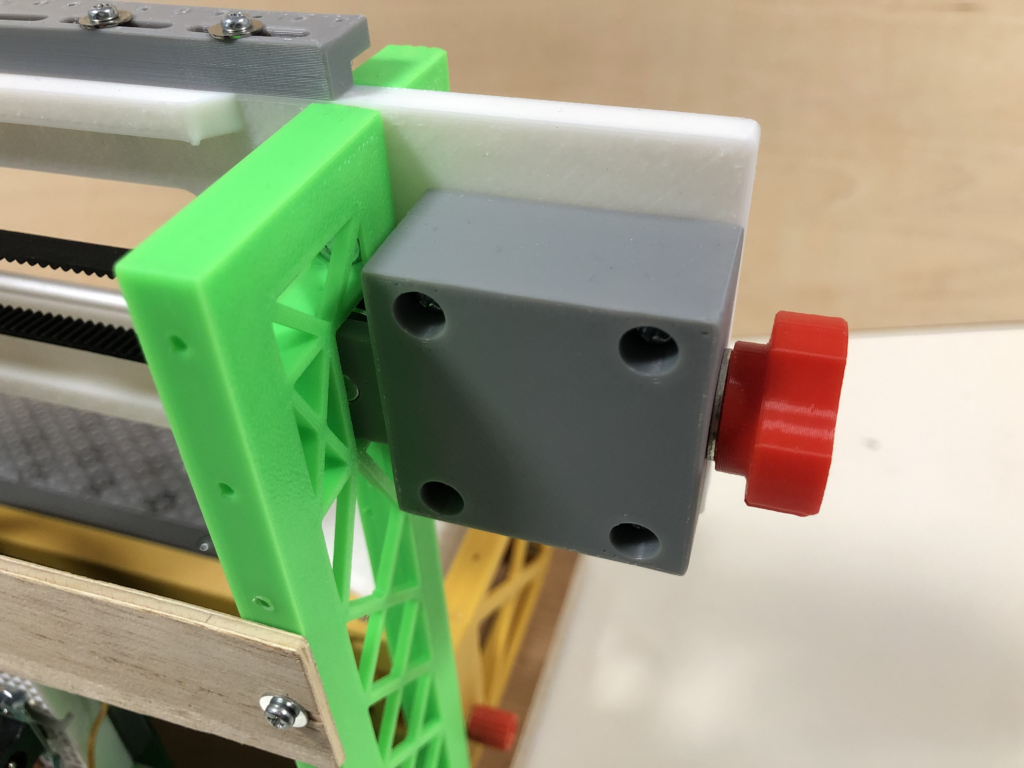
X axis
The x axis assembly is pulled on rails and by a tensionable timing belt. The timing belt is driven by a stepper motor. The x axis uses a photo interrupter to determine whether the x axis assembly is at the home position. A home search is done when the machine is switched on and then at the beginning of every pick and place cycle.
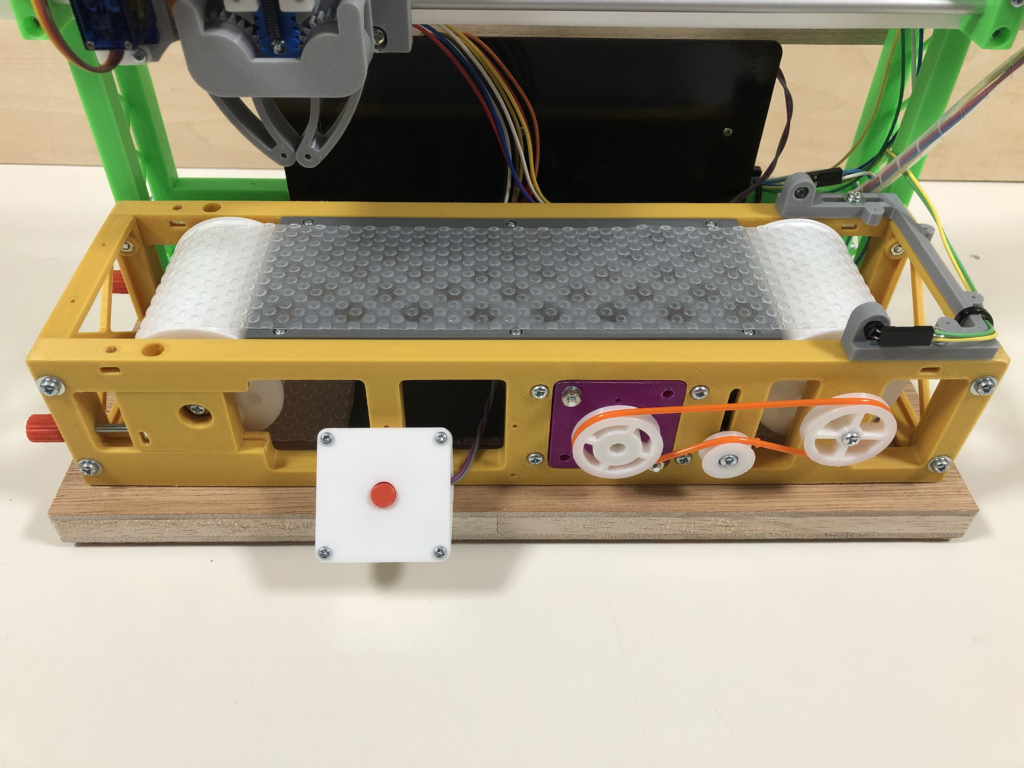
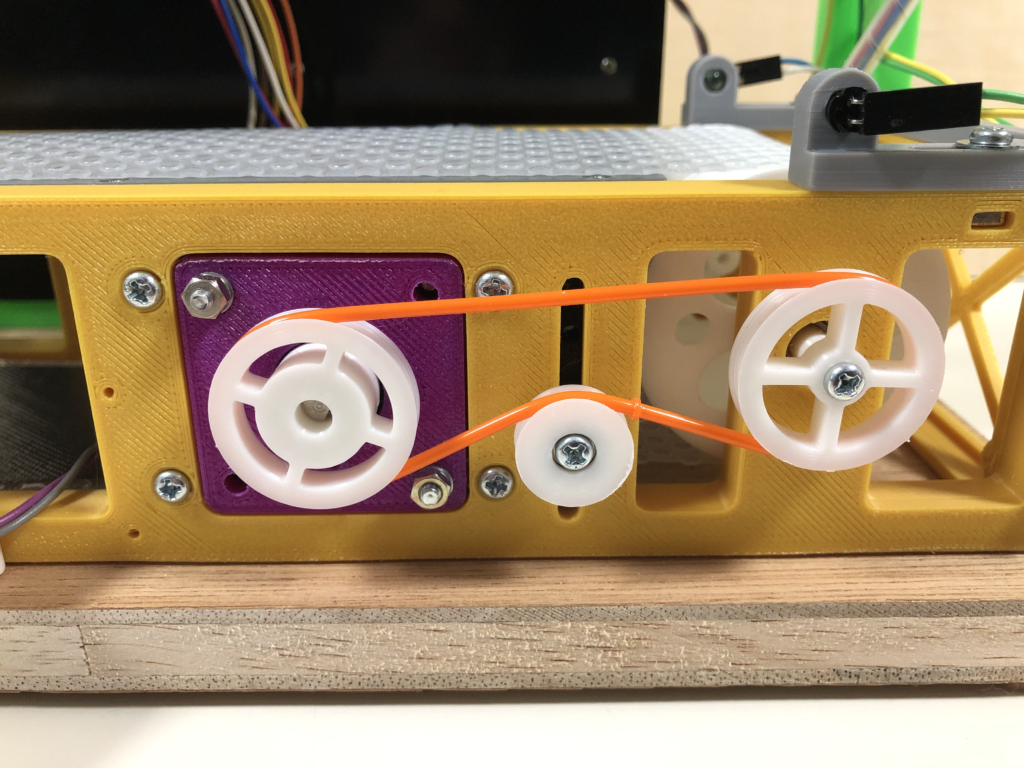
Conveyor
The conveyor belt is driven by a stepper motor thru a tensionable rope pulley system. The conveyor belt is also tensionable. Like the x axis, the conveyor also uses a photo interrupter to sense the package is at the home position.
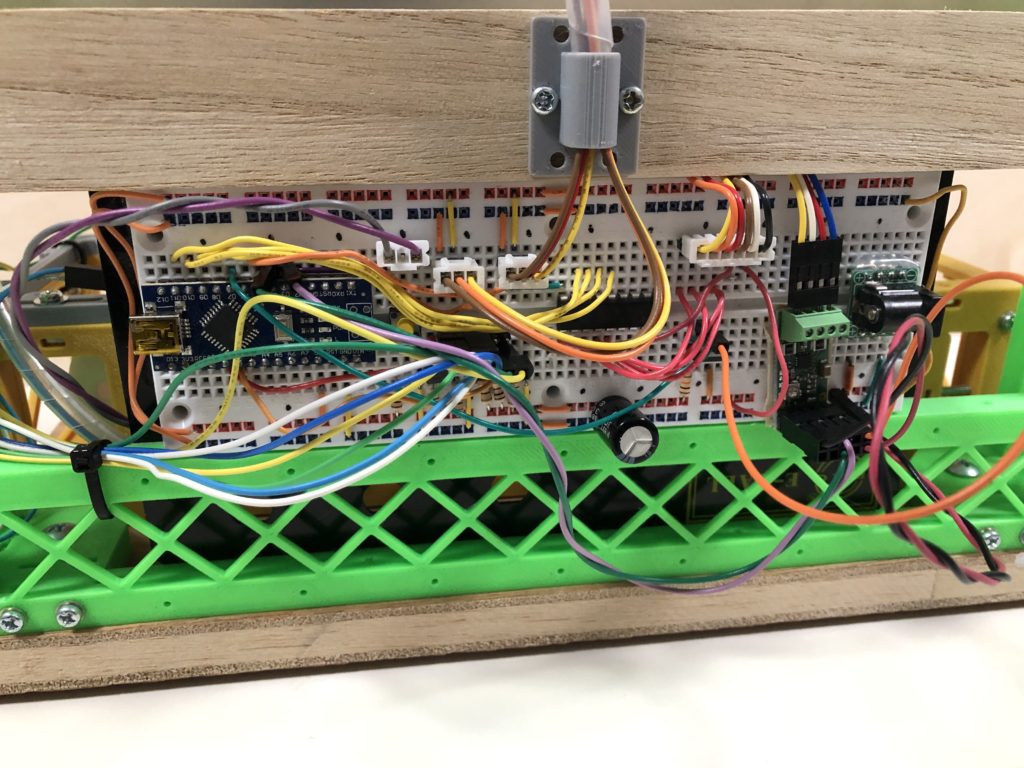
Electronics
The machine is controlled by an Arduino Nano.
Expandability
The machine is easily expandable so that the students can continue improving their programming and machine and electronics design skills. Some examples are below.
Idea 1: Replace the gripper with an electromagnet
The gripper could be swapped out for an electromagnet to pick up ferrous objects. Additional circuitry will be required for the electromagnet, and , depending on the electromagnet specs, it might be necessary to furnish an additional power supply.
Idea 2: Replace the conveyor with a table
The conveyor could be replaced with a forward-backward moving table. This will give the machine the ability to move objects around on a horizontal plane within the extents of the x and y axes.
Idea 3: X axis position sensing by ultrasonic sensor
The machine uses a photo interrupter as the home or origin sensor. This could be replaced or supplemented with an ultrasonic sensor to enable free positioning within the extents of x travel.
